Blog
CamBam
PCB Isolation Routing
CNC
Mk I (smasher)
Frame
Linear guides
Leadscrew drive
Motors and controller
Improvements
CNC Software
Gallery
Touch Probe
CNC Links
Links
Contact

Homemade CNC Router
Motors and Controller

I originally had intended to use the servo motors that I had rescued from the printers but had trouble finding a suitable free driver design. Instead, I opted for 3 new 180Ncm stepper motors and Alan Garfield's open source picstep stepper driver design.
Motors go faster if driven with higher voltages. This voltage can often be many times the rated voltage of the motor provided the driver electronics can apply it sensibly. Excess current will just heat up and potentially damage the motors so this needs to be either burned off using ballast resistors or by a more intelligent current limiting driver. PICSteps are a chopper driver and thus do without inefficient ballasts.
I made a very simple linear power supply. This comprised of a 40V 20A torroidal transformer, rectifier bridge and filtering caps.
NOTE: At this voltage and nearly 3A setting, the PICsteps are about at the limit of their design envelope. Adequate cooling is esential as thermal cut outs in the LMD18245 will start to cause intermitant 'missed' steps before shutting down the drivers completely. This demonstrates their great self preservation capabilities. Other than gratuitous short circuits, these drivers are fairly robust.
Building PICsteps from scratch is not for the faint of heart. There are a number of low cost high spec stepper drivers available. These cost only a little more than buying the components to do it yourself and can perform much better.
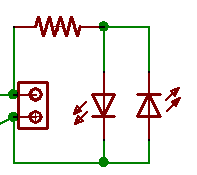
Test circuit. Here is a handy circuit for testing the output of stepper drivers. A green led indicates a pulse in one direction and red the reverse direction. They can be used with or without the motors connected and even connected to just a stepper to view the back EMF pulses.
I used Alan Garfield's opto isolater interface which works fine for me but others have had some problems getting it to work. The tolerances in the optos used and low voltage parallel port drivers used in modern PCs may conspire to cause problems. Especially with lower pulse widths. In Mach 3 I make sure that the minimum pulse width is 5us. Anything less than this may cause problems.